Większość ramion robotów jest zbudowana z pewnej kombinacji długich prostych rur i ruchomych przegubów. Nie jest to zaskakujące, ponieważ nasze kończyny są zbudowane w ten sam sposób, co było sprytnym i wydajnym projektem. Dodając więcej rur i złączy (lub stopni swobody), możesz zwiększyć wszechstronność ramienia robota, ale wiąże się to z tym, że wzrośnie również złożoność, waga i koszt.
W ICRA naukowcy z laboratorium REDS w Imperial College w Londynie, kierowani przez Nicolasa Rojasa, przedstawili projekt robota, który jest zbudowany wokół plastycznej zamiast sztywnej struktury, co pozwala zwiększyć wszechstronność ramienia bez konieczności dodawania dodatkowych stopni swobody. Nie jesteśmy już ograniczeni do statycznych rur i złączy, ale możemy zmienić konfigurację robota, aby ustawić go dokładnie tak, jak potrzebujemy i w razie potrzeby łatwo dostosować.
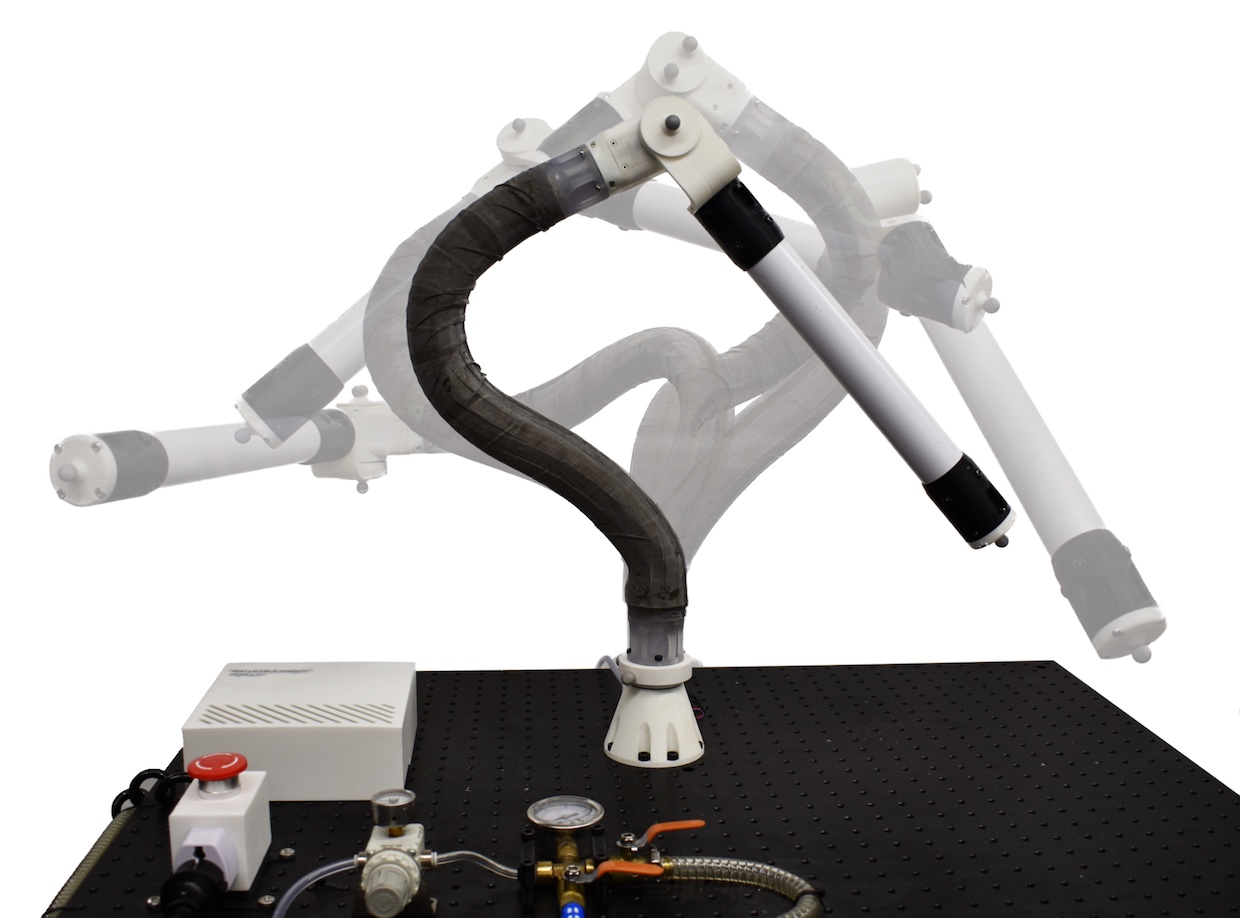
Wewnątrz tej podatnej na zginanie sekcji ramienia znajdują się warstwy arkuszy mylaru, pocięte na klapki i ułożone jedna na drugiej, tak, aby każda klapka zachodziła na siebie co najmniej 11 razy. Mylar jest na tyle śliski, że w większości przypadków klapki mogą się płynnie przesuwać względem siebie, umożliwiając dopasowanie kształtu ramienia. Klapki są uszczelnione między membranami lateksowymi, a kiedy powietrze jest wypompowywane spomiędzy membran, dociskają się do siebie i usztywniają całą konstrukcję, blokując się w dowolnym kształcie, w jakim je zostawisz.
Zaletą tego systemu jest to, że jest to rodzaj połączenia miękkiego i sztywnego robota – uzyskujemy elastyczność miękkiego systemu, bez konieczności zajmowania się wszystkimi problemami ze sterowaniem. Jest bardziej skomplikowany pod względem mechanicznym (jak to zwykle bywa w systemach hybrydowych), ale oszczędzamy na kosztach, rozmiarach i wadze oraz zmniejszamy liczbę potrzebnych siłowników, które zwykle są punktami awarii. Musimy poradzić sobie z tworzeniem i utrzymywaniem próżni oraz z faktem, że plastyczne ramię nie jest całkowicie sztywne, ale w zależności od zastosowania te kompromisy mogą być tego warte.

